Supermanoeuvre Robot Wire Bending- 09.06.12
 Here’s the latest from our NOTlabs director and robot wrangler, Shawn Sims, from our explorations at the 2012 Venice Architecture Biennale!
Here’s the latest from our NOTlabs director and robot wrangler, Shawn Sims, from our explorations at the 2012 Venice Architecture Biennale!
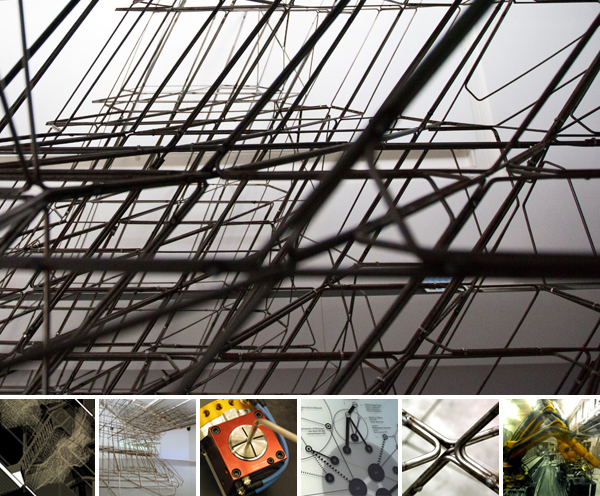
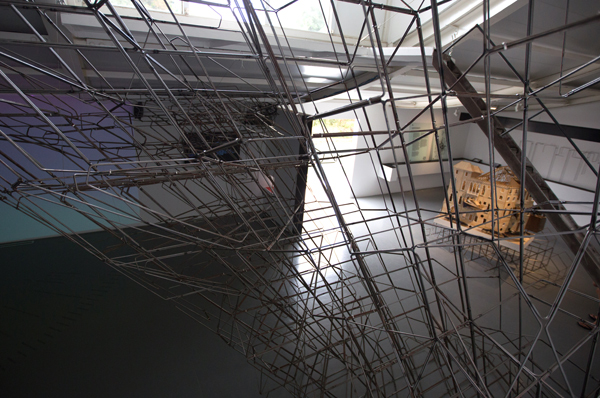
It was an awesome surprise to step into the Australian Pavilion at the 2012 Venice Architecture Biennale and see a robot wire-bending installation by my old professor, Dave Pigram! He and Iain Maxwell of Supermanoeuvre collaborated with Wes Mcgee from Matter Design Studio and together set out to design a wire-bent sculpture specifically for the pavilion. The installation begins on the lower level of the pavilion and spans all the way to the ceiling. As you get closer you notice intricate details of how it all fits together and can’t help but marvel at the precision.
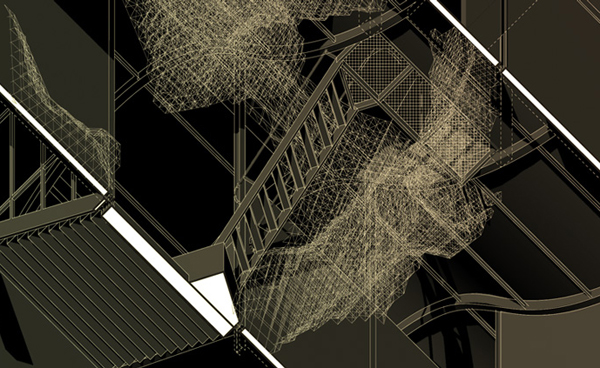
Before bending each rod, curves are drawn and analyzed on the computer. Those 3D curves are then digitally interpreted to tell the robot how to move and what to do. The wire bender and the robot arm work together, rotating, grabbing, and bending each vertex. Since robotic fabrication is extremely precise and the makeup of the steel can vary, the result is a near perfect physical manifestation of the digital model. Once each rod is completed, larger chunks are assembled from the individual pieces. They use small tack welds to hold the assemblies in place. The designers and fabricators wrote custom software, made unique hardware, and are actively redefining the way we design and make things. Take a look at the Australian Pavilion installation as well as the robots in action on the next page!


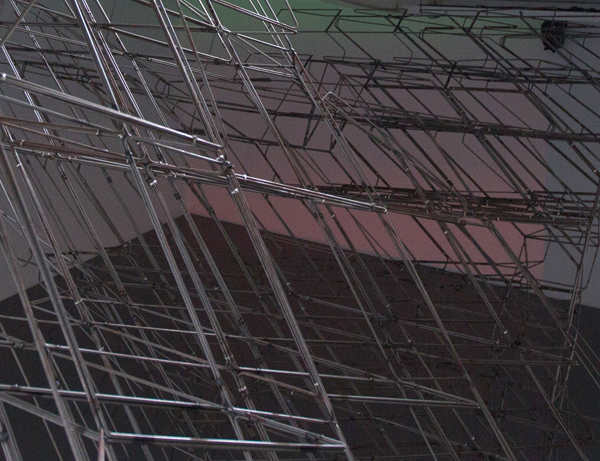

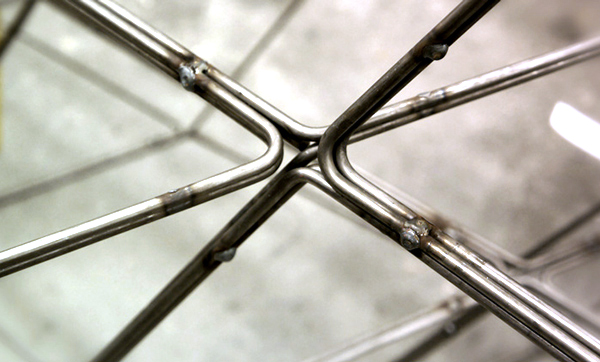 Here you can see the parallel rods nested together and a few welds holding them in place.
Here you can see the parallel rods nested together and a few welds holding them in place.

 Here are a few study pieces displayed to help people understand the process…
Here are a few study pieces displayed to help people understand the process…
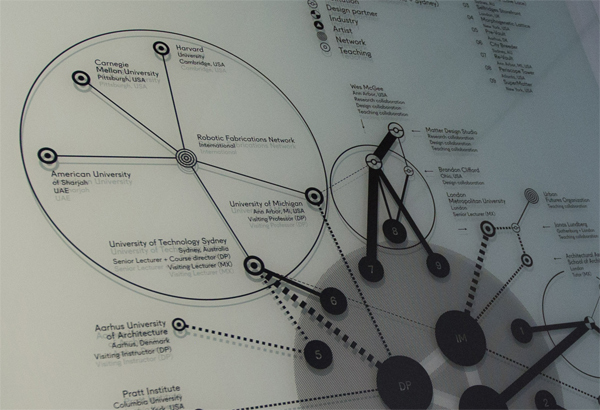 Clearly, work of this kind takes help from all over the globe. Exciting to see my old lab from CMU on the diagram as well!
Clearly, work of this kind takes help from all over the globe. Exciting to see my old lab from CMU on the diagram as well!
Check out how this installation was made in the video.
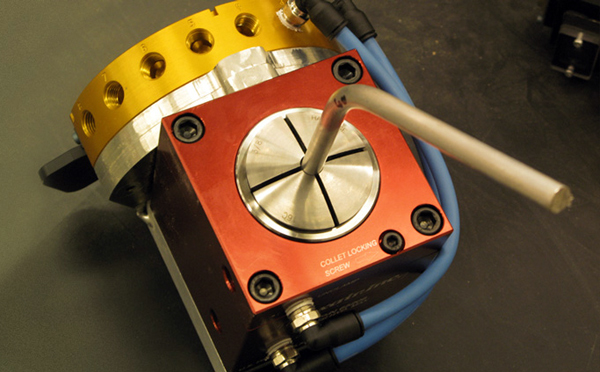 This is the custom pneumatic gripper made for the end of the robot that allows it to grab the slippery steel rod using only air pressure and a simple on+off signal to either open or close its grip.
This is the custom pneumatic gripper made for the end of the robot that allows it to grab the slippery steel rod using only air pressure and a simple on+off signal to either open or close its grip.
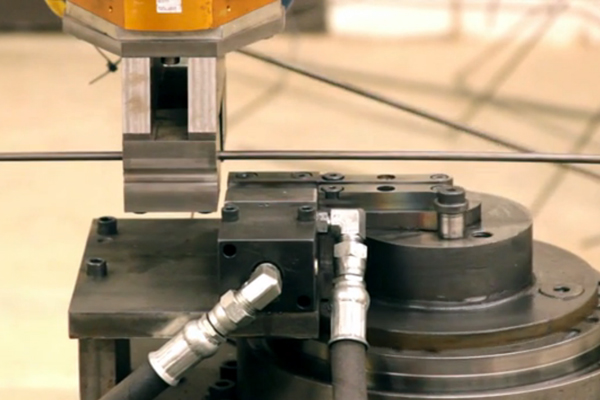
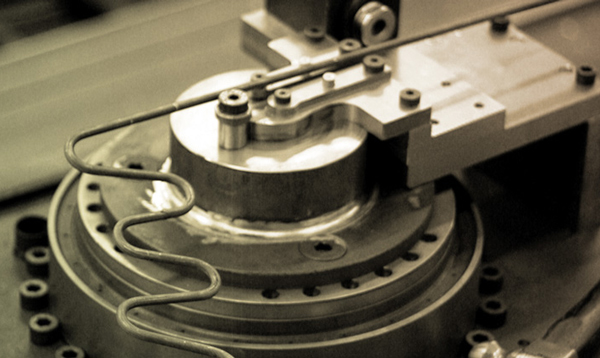 This computer controlled pipe bender is able to accurately bend high strength steel.
This computer controlled pipe bender is able to accurately bend high strength steel.
 Now you can see how they work together! Here, the robot arm is holding the steel rod in place while the rotating clamp bends the rod to the specifications of the computer model.
Now you can see how they work together! Here, the robot arm is holding the steel rod in place while the rotating clamp bends the rod to the specifications of the computer model.

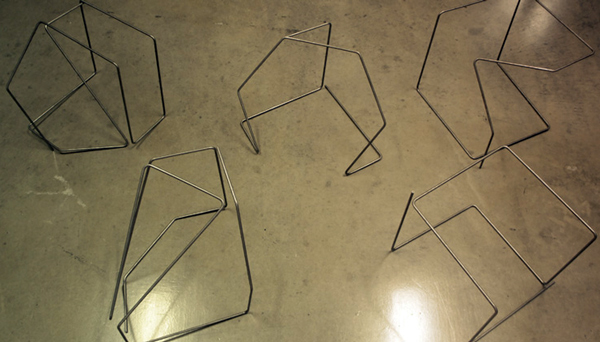 Here are a few individual bent rods ready for assembly!
Here are a few individual bent rods ready for assembly!